Calculating the transformation between two set of points
Hypotheses
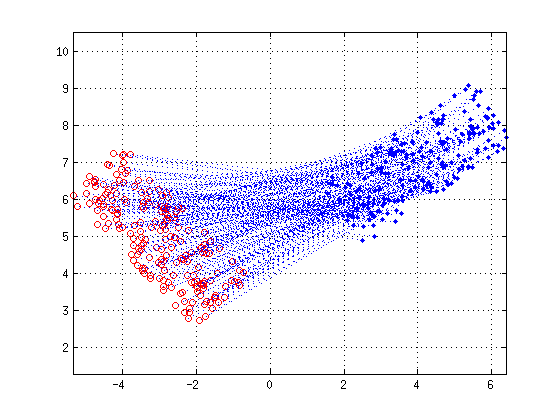
The aim of this article is to minimize the error between two clouds of points (minimization of the point to point error). Let’s considere the following cloud of points A in blue and B in red. Our goal is to find the transformation of B (translation and rotation) in order to minimize the distance point to point (according to the least square minimization).

$$ A =\left[ \begin{matrix} p_1^a & p_2^a & ... & p_n^a \end{matrix} \right] =\left[ \begin{matrix} x_1^a & x_2^a & ... & x_n^a \ y_1^a & y_2^a & ... & y_n^a \end{matrix} \right] $$
$$! B =\left[ \begin{matrix} p_1^b & p_2^b & ... & p_n^b \end{matrix} \right] =\left[ \begin{matrix} x_1^b & x_2^b & ... & x_n^b \ y_1^b & y_2^b & ... & y_n^b \end{matrix} \right] $$
We assume that the point matching has already being performed: each point of \(A\) is associated with a point of \(B\).
Translation
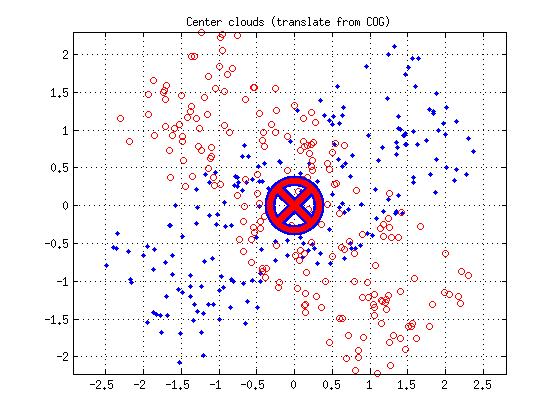
First, compute the center of gravity of each cloud:

$$ \begin{matrix}COG^a=\frac{1}{n}. \sum\limits_{i=1}^n p_i^a & COG^b=\frac{1}{n}. \sum\limits_{i=1}^n p_i^b \end{matrix} $$
Translate each point with a translation vector given by the center of gravity of its cloud (center each cloud on the origin).
$$ \begin{matrix} A'=A-COG^a & B'=B-COG^b \end{matrix} $$
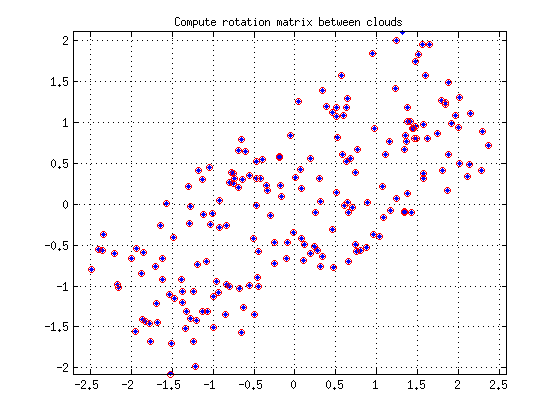
Rotation
The rotation is a little bit more tricky. First calculate the following matrix:
$$ N = \sum\limits_{i=1}^n {p'}_i^b.{{p'}_i^a}^T = \sum\limits_{i=1}^n \left[ \begin{matrix} {x'}_i^b \ {y'}_i^b \end{matrix} \right]. \left[ \begin{matrix} {x'}_i^a & {y'}_i^a \end{matrix} \right] $$
Compute the singular value decomposition of \(N\):
$$ N=U.\Sigma.V^T $$
The rotation matrix is given by:
$$ R=V.U^T $$
The rotation angle can now be extracted from the matrix \(R\):
$$ \alpha=atan2(R_{21},R_{11}) $$
By applying the rotation on the previously translated set of points, we get the following result:
Download
Matlab source code (example on this page) can be download here:
Credits: based on the very good bachelor thesis of Hans Martin Kjer and Jakob Wilm: Evaluation of surface registration algorithms for PET motion correction.
See also
- Catmull-Rom splines
- Check if a number is prime online
- Check if a point belongs on a line segment
- Cross product
- Common derivatives rules
- Common derivatives
- Dot product
- How to calculate the intersection points of two circles
- How to check if four points are coplanar?
- Common integrals (primitive functions)
- Least square approximation with a second degree polynomial
- Least-squares fitting of circles
- Least-squares fitting of sphere
- The mathematics behind PCA
- Online quadratic equation solver
- Online square root simplifyer
- Sines, cosines and tangeantes of common angles
- Singular value decomposition (SVD) of a 2×2 matrix
- Tangent line segments to circles
- Understanding covariance matrices
- Weighted PCA