Catmull-Rom splines
The Catmull-Rom splines is a method that approximate a set of points (named control points) with a smooth polynomial function that is piecewise-defined. One of the properties of the Catmull-Rom spline is that the curve will pass through all of the control points.
Equations
Two points on each side of the desired portion are required. In other words, points \( P_{i-1} \) and \( P_{i+2} \) are needed to calculate the spline between points \(P_i\) and \(P_{i+1}\).

Given points \(P_{i-1}\), \(P_{i}\), \(P_{i+1}\) and \(P_{i+2}\), the coordinates of a point \(P\) located between \(P_i\) and \(P_{i+1}\) are calculated as:
$$ P = \frac{1}{2} . \left[ \begin{matrix} 1 & t & t^2 & t^3 \end{matrix} \right]. \left[ \begin{matrix} 0 & 2 & 0 & 0 \\ -1 & 0 & 1 & 0 \\ 2 & -5 & 4 & -1 \\ -1 & 3 & -3 & 1 \end{matrix} \right]. \left[ \begin{matrix} P_{i-1} & P_{i} & P_{i+1} & P_{i+2} \end{matrix} \right]^\top $$
General case: tension
The previous equation is a particular case of the general geometry matrix given by the following equation:
$$ P = \left[ \begin{matrix} 1 & t & t^2 & t^3 \end{matrix} \right]. \left[ \begin{matrix} 0 & 1 & 0 & 0 \\ -\tau & 0 & \tau & 0 \\ 2.\tau & \tau-3 & 3-2\tau & -\tau \\ -\tau & 2-\tau & \tau-2 & \tau \end{matrix} \right]. \left[ \begin{matrix} P_{i-1} & P_{i} & P_{i+1} & P_{i+2} \end{matrix} \right]^\top $$
The parameter \(\tau\) modify the tension of the curve. The following figure illustrates the influence of the parameter \(\tau\) on the curve. Note that \(\tau=\frac{1}{2}\) is commonly used (as in the particular case presented previously).

Derivative
As the spline is \(C^1\) continuous it is possible to compute the derivative for any value of \(t\). Moreover, as the definition of the spline is a polynomial, it is quite trivial to compute the derivative at a given point:
$$ P = \left[ \begin{matrix} 0 & 1 & 2.t & 3.t^2 \end{matrix} \right]. \left[ \begin{matrix} 0 & 1 & 0 & 0 \\ -\tau & 0 & \tau & 0 \\ 2.\tau & \tau-3 & 3-2\tau & -\tau \\ -\tau & 2-\tau & \tau-2 & \tau \end{matrix} \right]. \left[ \begin{matrix} P_{i-1} & P_{i} & P_{i+1} & P_{i+2} \end{matrix} \right]^\top $$

Properties
- The spline passes through all of the control points.
- The spline is \(C^1\) continuous.
- The spline is not \(C^2\) continuous.
- The spline does not lie within the convex hull of their control points
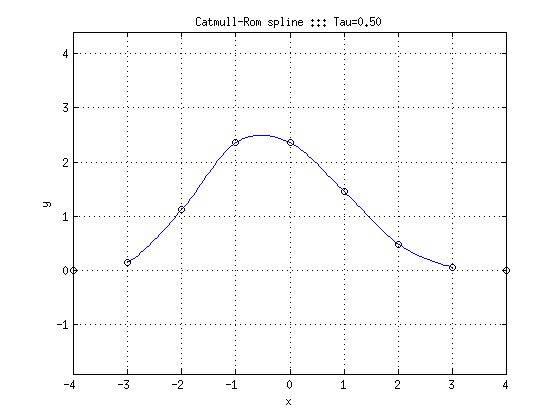
Examples
Here a simple example of Catmull-Rom spline (and its derivative) created with Matlab:

Closed-loop trajectory (with its derivative):


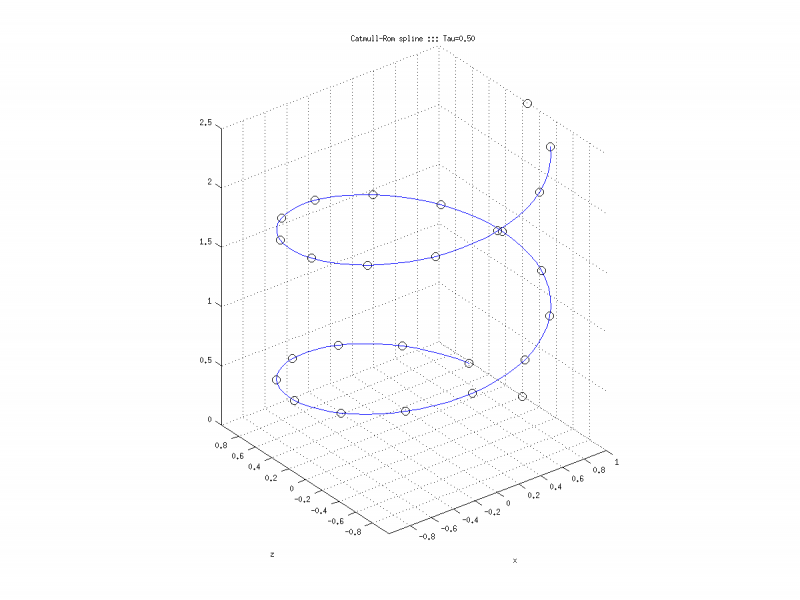
Example of 3D Catmull-Rom spline:
Download
- catmull-rom-spline-examples-for-matlab.zip (demo script for MATLAB)
See also
- Calculating the transformation between two set of points
- Check if a number is prime online
- Check if a point belongs on a line segment
- Cross product
- Common derivatives rules
- Common derivatives
- Dot product
- How to calculate the intersection points of two circles
- How to check if four points are coplanar?
- Common integrals (primitive functions)
- Least square approximation with a second degree polynomial
- Least-squares fitting of circles
- Least-squares fitting of sphere
- The mathematics behind PCA
- Online quadratic equation solver
- Online square root simplifyer
- Sines, cosines and tangeantes of common angles
- Singular value decomposition (SVD) of a 2×2 matrix
- Tangent line segments to circles
- Understanding covariance matrices
- Weighted PCA