How to calculate the intersection points of two circles
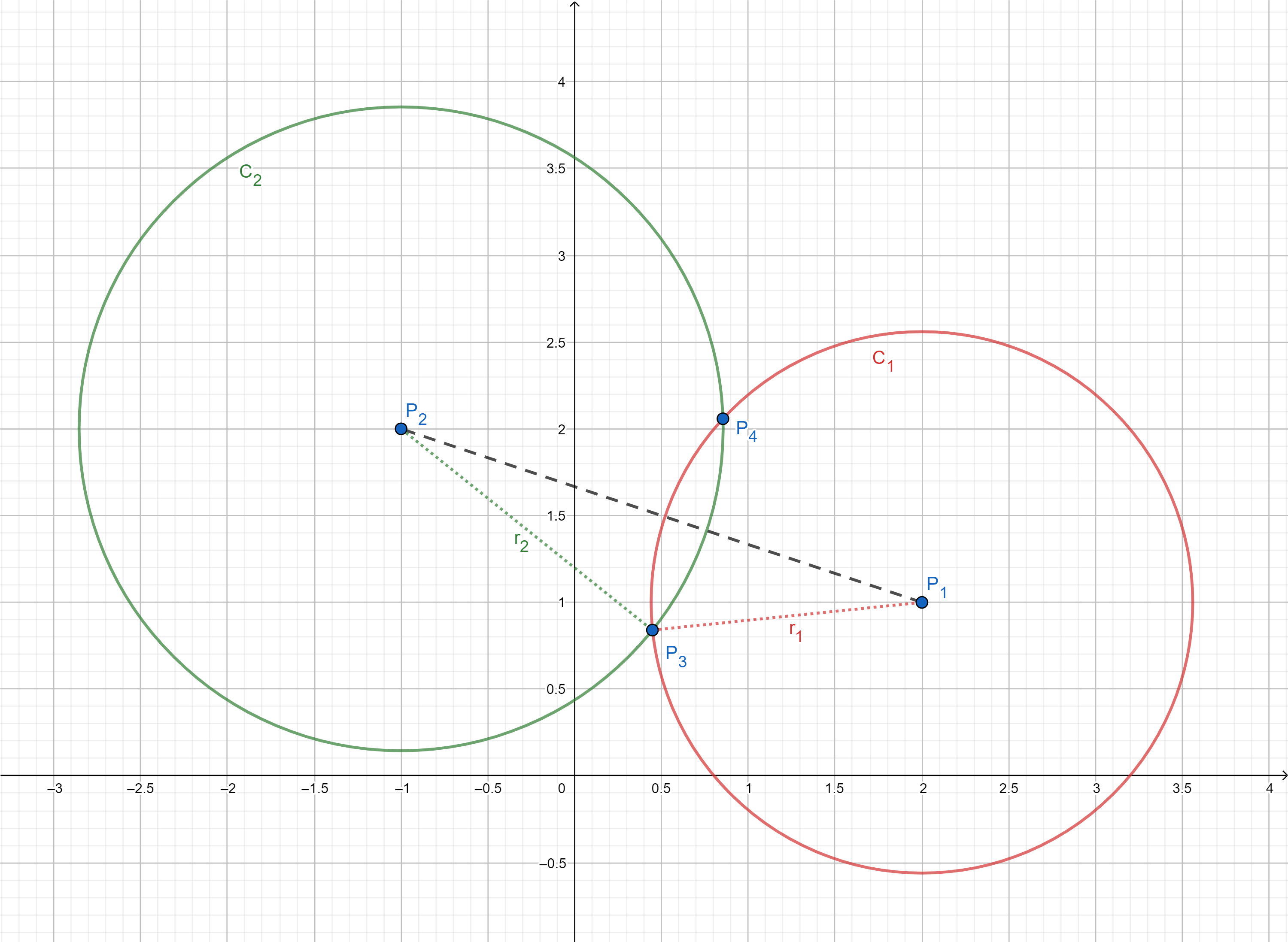
The aim of this page is to calculate the coordinates on the intersection points between two circles \( C_1 \) and \( C_2 \).
Here are our hypotheses:
- center of circle \( C_1 \) is \( P_1 = (x_1, y_1)\)
- center of circle \( C_2 \) is \( P_2 = (x_2, y_2)\)
- radius of circle \( C_1 \) is \( r_1 \)
- radius of circle \( C_2 \) is \( r_2 \)
Our goal is to calculate the coordinates of the intersection points \( P_3 \) and \( P_4 \) as a function of \( P_1 \) , \( P_2 \) , \( r_1 \) and \( r_2 \).
Intermediate steps
Here are the intermediate steps for computing the intersection points:
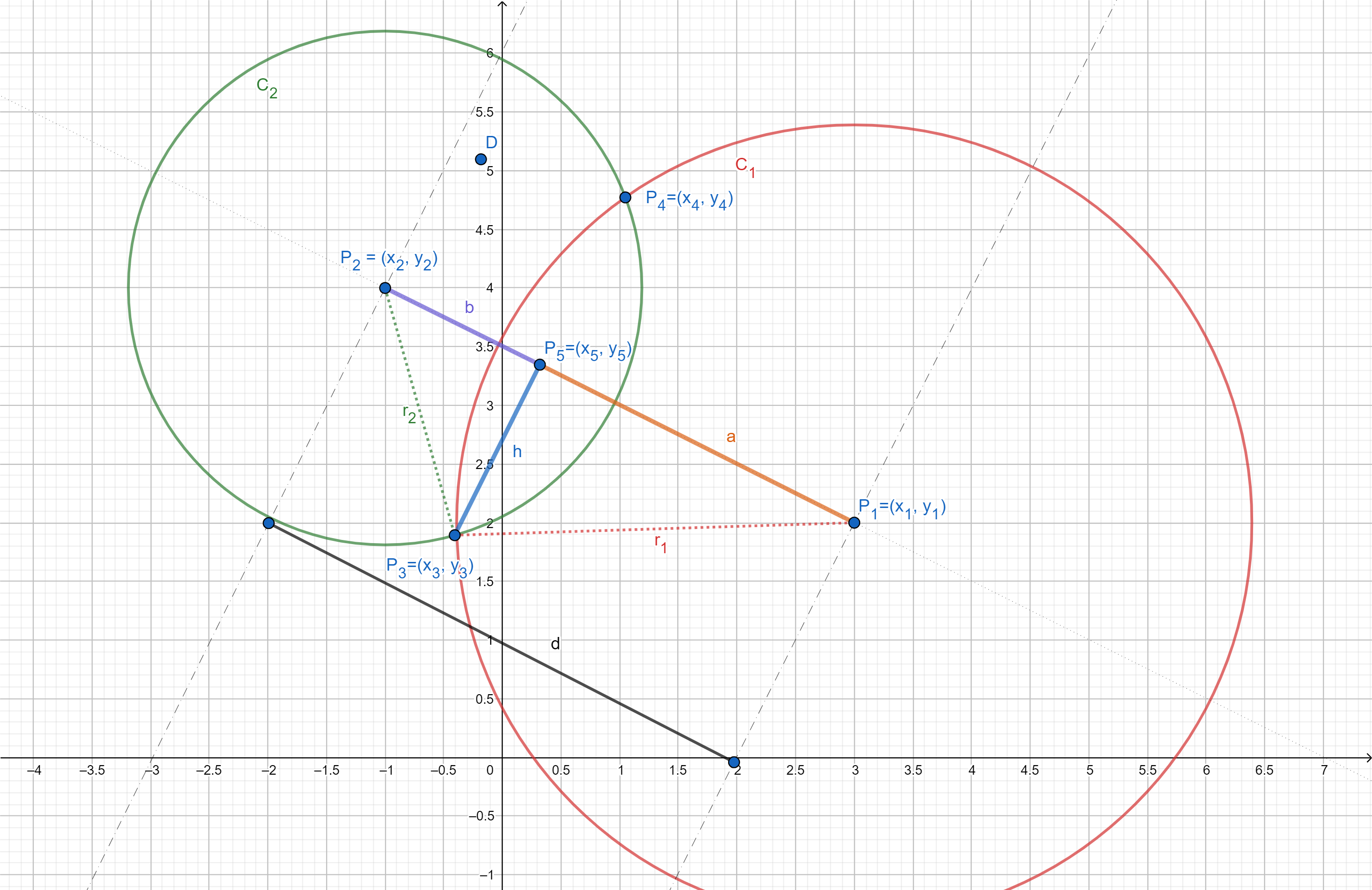
- Calculating the distance \( d \) between circle centers
- Checking cases
- Calculating the length of \( a \) and \( b \)
- Calculation of h
- Calculating the coordinates of \( P_5 \)
- Calculation of vectors \( \overrightarrow{P_5P_3} \) and \( \overrightarrow{P_5P_4} \)
- calculating the coordinates of \( P_3 \) and \( P_4 \)
Distance between centers
Let's start by calculating the \( d \), the distance between the centers. By applying the Pythagorean theorem we can write:
$$ d = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 } \label{eq:d} $$
Checking cases
According to the values of \( d \), we now have five cases:
- if \( d > r_1 + r_2 \) the circles are too far apart and do not intersect;
- if \( d < | r_1 - r_2 | \) one circle is inside the other and do not intersect;
- if \( d = 0 \) and \( r_1 = r_2 \) the circles are merged and there are an infinite number of points of intersection;
- if \( d = r_1 + r_2 \) there is a single intersection point;
- si \( d = r_1 - r_2 \) or \( d = r_2 - r_1 \) there is a single intersection point, but one circle in inside the other;
- if \( d < r_1 + r_2 \) there are two intersection points.
| \( d > r_1 + r_2 \) | \( d < \lvert r_1 - r_2 \rvert \) |
|---|---|
 |
 |
| \( d = 0 \) and \( r_1 = r_2 \) | \( d = r_1 + r_2 \) |
|---|---|
 |
 |
| \( d = r_1 - r_2 \) or \( d = r_2 - r_1 \) | \( d < r_1 + r_2 \) |
|---|---|
 |
 |
Calculating a and b
To calculte the distance \(a\) let's start by writing \( h \) as a function of \( a \) and \( b \) . In the right triangles \( P_1 P_5 P_3 \) the Pythagorean theorem gives:
$$ r_1^2 = h^2 + a^2 \label{eq:h1} $$
We can apply the theorem in the right triangle \( P_2 P_5 P_3 \):
$$ r_2^2 = h^2 + b^2 \label{eq:h2} $$
By substituting \eqref{eq:h2} to \eqref{eq:h1} we get the following equation:
$$ r_1^2 - r_2^2 = a^2 - b^2 \label{eq:ab} $$
Since \( d = a +b \), we can write the folowing system of two equations:
$$ \left\{ \begin{split} & r_1^2 - r_2^2 = a^2 - b^2 \\ & d = a +b \end{split} \right. $$
By injecting \( b = d-a \) in equation \eqref{eq:ab}, we obtain the following relation:
$$ r_1^2 - r_2^2 = a^2 - (d-a)^2 $$
The \( –a^2 \) terms on each side cancel out. You can then solve for \( a \):
$$ \begin{split} r_1^2 - r_2^2 &= a^2 - d^2 - a^2 + 2ad \\ r_1^2 - r_2^2 &= - d^2 + 2ad \\ 2ad & = r_1^2 - r_2^2 + d^2 \end{split}$$
We get :
$$ a = \dfrac{r_1^2 - r_2^2 + d^2 }{2d} $$
Similarly in the triangle \( P_2 P_5 P_3 \) :
$$ b = \dfrac{r_2^2 - r_1^2 + d^2 }{2d} $$
All of these values are known:
- \( r_1 \) and \( r_2 \) are the radius of the circles
- \( d \) has been calculated by equation \eqref{eq:d}
Calculation of h
Once \( a \) and \( b\) are know, it becomes easy to calculate the length \( h \) by apoplying the Pythagorean theorem in the right triangles \( P_1 P_5 P_3 \)
$$ r_1^2 = h^2 + a^2 $$
$$ h = \sqrt{ r_1^2 - a^2 }$$
Coordinates of P5
The next step is to calculate the coordinates of \( P_5 \).

Since the vectors \( \overrightarrow{P_1P_5} \) and \( \overrightarrow{P_1P_2} \) are colinear, we can write:
$$ \overrightarrow{P_1P_5} = \dfrac{a}{d} \times \overrightarrow{P_1P_2} $$
We can deduce the coordinates of \( P_5 \):
$$ \begin{split} x_5 &= x_1 + \dfrac{a}{d} \times (x_2 - x_1) \\ y_5 &= y_1 + \dfrac{a}{d} \times (y_2 - y_1) \end{split} $$
Vectors P5P3 and P5P4
The second to last step is the calculation of vectors \( \overrightarrow{P_5P_3} \) and \( \overrightarrow{P_5P_4} \) . Let's consider the vector \( \overrightarrow{P_1P_2} \) given by the following relation:
$$ \overrightarrow{P_1P_2} = \begin{pmatrix} x_2 - x_1 \\ y_2 - y_1 \end{pmatrix} $$
By multiplying this vector by a rotation matrix around the z-axis, we can calculate the perpendicular vectors:
Clockwise
$$ \overrightarrow{P_1P_2}^{\bot \circlearrowright} = \begin{pmatrix} 0 && 1 \\ -1 && 0 \end{pmatrix} \times \begin{pmatrix} x_2 - x_1 \\ y_2 - y_1 \end{pmatrix} = \begin{pmatrix} y_2 - y_1 \\ x_1 - x_2 \end{pmatrix} $$
Counterclockwise
$$ \overrightarrow{P_1P_2}\ {}^{\bot \circlearrowleft} = \begin{pmatrix} 0 && -1 \\ 1 && 0 \end{pmatrix} \times \begin{pmatrix} x_2 - x_1 \\ y_2 - y_1 \end{pmatrix} = \begin{pmatrix} y_1 - y_2 \\ x_2 - x_1 \end{pmatrix} $$
We already calculated the norm of vector \( \lVert \overrightarrow{P_1P_2} \rVert = d \) and norm of vectors \( \lVert \overrightarrow{P_5P_3} \rVert = \lVert \overrightarrow{P_5P_4} \rVert = h \).
By applyting the ratio \( \dfrac{h}{d} \) to the vectors \( \overrightarrow{P_1P_2}^{\bot} \) we can deduce the expressions of vectors \( \overrightarrow{P_5P_3}^{\bot} \) and \( \overrightarrow{P_5P_4}^{\bot} \):
$$ \overrightarrow{P_5P_3}^{\bot} = \dfrac{h}{d} \times \overrightarrow{P_1P_2}^{\bot \circlearrowleft} =\begin{pmatrix} \dfrac{h(y_2 - y_1)}{d} \\ \dfrac{h(x_1 - x_2)}{d} \end{pmatrix} $$
$$ \overrightarrow{P_5P_4}^{\bot} = \dfrac{h}{d} \times \overrightarrow{P_1P_2}^{\bot \circlearrowright} =\begin{pmatrix} \dfrac{h(y_1 - y_2)}{d} \\ \dfrac{h(x_2 - x_1)}{d} \end{pmatrix} $$
Intersection points
Once the vectors \( \overrightarrow{P_5P_3} \) and \( \overrightarrow{P_5P_4} \) are known, the coordinates of \(P_3\) and \(P_4\) can be deduced by translating \( P_3\) from these vectors. We finally get:
$$ P_3 =\begin{pmatrix} x_5 - \dfrac{h(y_2 - y_1)}{d} \\ y_5 + \dfrac{h(x_2 - x_1)}{d} \end{pmatrix} $$
and
$$ P_4 =\begin{pmatrix} x_5 + \dfrac{h(y_2 - y_1)}{d} \\ y_5 - \dfrac{h(x_2 - x_1)}{d} \end{pmatrix} $$
We can even rewrite this answer:
$$ \begin{split} x &=& x_5 ~\pm~ \dfrac{h(y_2 - y_1)}{d} \\ y &=& y_5 ~\pm~ \dfrac{h(x_2 - x_1)}{d} \end{split} $$
Download
Here is the Matlab script used to check the results from this page:

See also
- Calculating the transformation between two set of points
- Catmull-Rom splines
- Check if a number is prime online
- Check if a point belongs on a line segment
- Cross product
- Common derivatives rules
- Common derivatives
- Dot product
- How to check if four points are coplanar?
- Common integrals (primitive functions)
- Least square approximation with a second degree polynomial
- Least-squares fitting of circles
- Least-squares fitting of sphere
- The mathematics behind PCA
- Online quadratic equation solver
- Online square root simplifyer
- Sines, cosines and tangeantes of common angles
- Singular value decomposition (SVD) of a 2×2 matrix
- Tangent line segments to circles
- Understanding covariance matrices
- Weighted PCA