Mathematical model of a mechanical differential
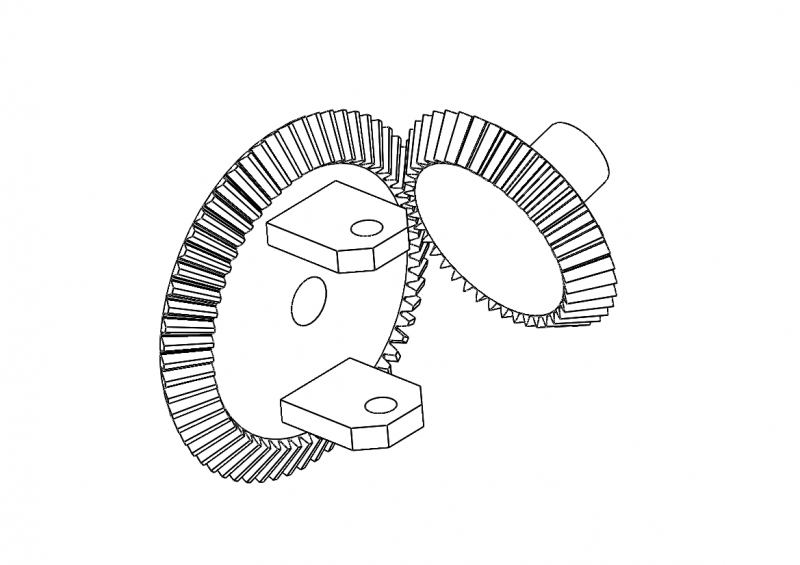
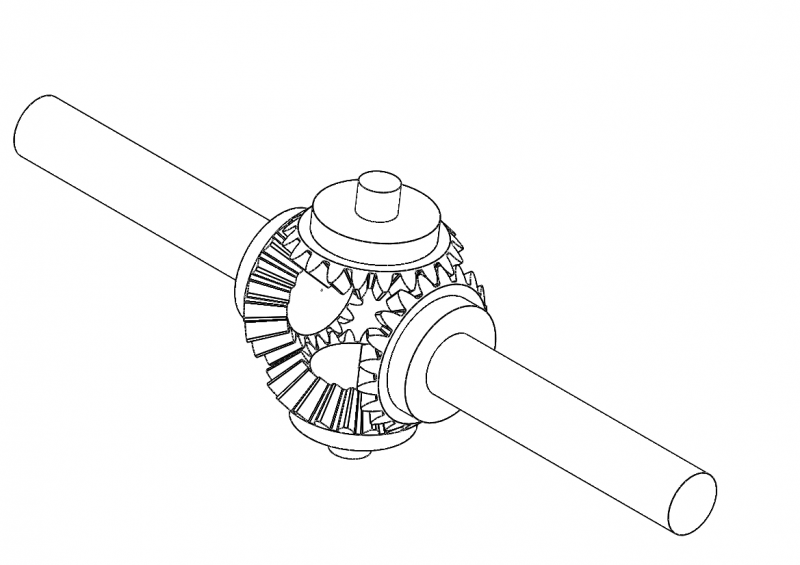
This page describes and explains the mathematical model of a car differential. We will consider the following device:

Framework
First, let's define the framework, axis and positive direction of rotation:

Let's name each gear. The gear number \(i\) is labelled with name \(Z_i\) and is composed of \(Z_i\) teeth:

Right angle transmission
Let's have a look at the right angle transmission:
This is a classical right angle gear, the transmission is given by:
$$ \omega_1.Z_1 = \omega_2.Z_2 $$
and
$$ \frac {\Gamma_1}{\Gamma_2} = \frac {Z_1} {Z_2} $$
We will no longer consider this transmission in the following.
Carrier’s frame
We will now work in a new referential attached to the carrier and focus on gears \(Z_3\), \(Z_4\), \(Z_5\) and \(Z_6\). The term \(\omega^c_i\) is the angular velocity of gear \(Z_i\) expressed in the carrier's referential.
According to the previous direction of rotation, the transmissions between gears \(Z_3\), \(Z_4\), \(Z_5\) and \(Z_6\) are given by:
$$ \begin{matrix} \omega^c_4.Z_4=\omega_3^c.Z_3 \\ \omega^c_3.Z_3=\omega^c_5.Z_5 \end{matrix} $$
Note that the gear \(Z_6\) is redundant with the gear \(Z_3\). The relation between gears \(Z_4\) and \(Z_5\) is given by:
$$ \omega^c_4.Z_4=-\omega^c_5.Z_5 $$ $$ \frac{\omega^c_4}{\omega^c_5}=-\frac{Z_5}{Z_4}=-1 $$
As \(Z_4=Z_5\), the relation between angular velocities is :
$$ \omega^c_4=-\omega^c_5 $$
Global frame
Let's now come back in the global referential. The carrier angular velocity is given by \(\omega_2\). In the carrier's referential, the angular velocity of gear gear \( Z_4\) is equal to \(\omega_4\). The angular velocity of gear \(Z_4\) in the global referential is thus given by:
$$ \omega_4=\omega_2+\omega^c_4 $$
With the same reasoning, we can also express the angular velocity of gear \(Z_5\) in the global referential:
$$ \omega_5=\omega_2+\omega^c_5 $$
Gathering the previous equations gives the following system:
$$ \left\lbrace \begin{array}{r c l} \omega_4 &=& \omega_2+\omega^c_4 \\ \omega_5 &=& \omega_2+\omega^c_5 \\ \omega^c_4 &=& -\omega^c_5 \end{array} \right. $$
$$ \left\lbrace \begin{array}{r c l} \omega_4 &=& \omega_2-\omega^c_5 \\ \omega_5 &=& \omega_2+\omega^c_5 \end{array} \right. $$
$$ \left\lbrace \begin{array}{r c l} \omega^c_5 &=& \omega_2-\omega_4 \\ \omega_5 &=& \omega_2+\omega^c_5 \end{array} \right. $$
Solving the system provides the final equation of the model:
$$ \omega_2 = \frac{1}{2}(\omega_4+\omega_5) $$
Torque
The torque relation between gears \(Z_3\), \(Z_4\) and \(Z_5\) is given by:
$$ \begin{matrix} \frac{\Gamma_4}{\Gamma_3}=\frac{Z_4}{Z_3} \\ \frac{\Gamma_5}{\Gamma_3}=\frac{Z_5}{Z_3} \end{matrix} $$
As \(Z_5=Z_4\) :
$$ \frac{\Gamma_4}{\Gamma_3}=\frac{\Gamma_5}{\Gamma_3} $$
And finally :
$$ \Gamma_4=\Gamma_5 $$
Power
The input power must be equal to the output power:
$$ P_{in}=P_{out} $$
As \(P=\Gamma.\omega\), the output torque can be rewrite as:
$$ P_{out}=P_4+P_5=\Gamma_4.\omega_4+\Gamma_5.\omega_5 $$
As \(\Gamma_4=\Gamma_5\), the previous equation can be simplified:
$$ P_{out}=\Gamma_4.(\omega_4+\omega_5) $$
As \(\omega_4+\omega_5=2.\omega_2\), the previous equation can be rewriten:
$$ P_{out}=\Gamma_4.(2.\omega_2)=\Gamma_2\omega_2=P_{in} $$
Finally:
$$ 2.\Gamma_4=\Gamma_2 $$
Conclusion
The relation on velocities is given by:
$$ \omega_2 = \frac{1}{2}(\omega_4+\omega_5) $$
The relation on torques is given by:
$$ \frac{\Gamma_2}{2} = \Gamma_4=\Gamma_5 $$
See also
- Angular and linear velocity, cross product
- Configurable gear for solidwork
- Elastic collision - Part 1 - Hypotheses
- Elastic collision - Part 2 - Velocity decomposition
- Elastic collision - Part 3 - Velocity calculation
- Elastic collision - Part 4 - Synthesis and reminder
- Elastic collision - Part 5 - Source code
- Elastic collision - Equations and simulation
- Enable Add-Ins in Solidworks
- Newton's Second Law of motion
- Geometric model for differential wheeled mobile robot
- How to insert gears in a Solidwoks assembly
- Model of a rotary joint driven by a linear motor [Part 2]
- Model of a rotary joint driven by a linear motor [Part 3]
- Model of a rotary joint driven by a linear motor [Part 4]
- Model of a rotary joint driven by a linear motor