Segments tangents à deux cercles
Introduction
Cet article traite du calcul des coordonnées des points d’intersection des tangentes à deux cercles. Comme le montre la figure suivante, quatre configurations peuvent exister dans le cas général :
- \( R_A \) et \( P_A \) sont respectivement le rayon et le centre du premier cercle.
- \( R_B \) et \( P_B \) sont respectivement le rayon et le centre du deuxième cercle.
- \( P_1 \) est le point de contact de la tangente sur le premier cercle.
- \( P_2 \) est le point de contact de la tangente sur le deuxième cercle.

Mise en équation
Pour commencer, considérons le fait que chaque point appartient au cercle : $$ \left \{ \begin{array}{r c l} (x_1 - x_A)^2 + (y_1 - y_A)^2 = {R_A}^2 \\ (x_2 - x_B)^2 + (y_2 - y_B)^2 = {R_B}^2 \end{array} \right . $$
Considérons maintenant le fait que chaque segment tangent est perpendiculaire au rayon : $$ \left \{ \begin{array}{r c l} (x_1 - x_2)^2 + (y_1 - y_2)^2 + {R_A}^2 = (x_2 - x_A)^2 + (y_2 - y_A)^2 \\ (x_1 - x_2)^2 + (y_1 - y_2)^2 + {R_B}^2 = (x_1 - x_B)^2 + (y_1 - y_B)^2 \end{array} \right . $$
Il devient alors possible de résoudre ces quatre équations afin de déterminer les quatre inconnues. Malheureusement, le système n’est pas linéaire et la résolution est complexe.
Configuration de Thales
En revanche, nous pouvons tirer avantageusement profit des configurations de Thales qui nous permettent de calculer facilement la longueur \( \left | P_1 P_2 \right |\).
Première configuration
Dans cette configuration, le point \( U \) est ajouté sur le rayon du cercle \(C_B\) de façon à ce que \( \left | UP_B \right | = R_B - R_A \).
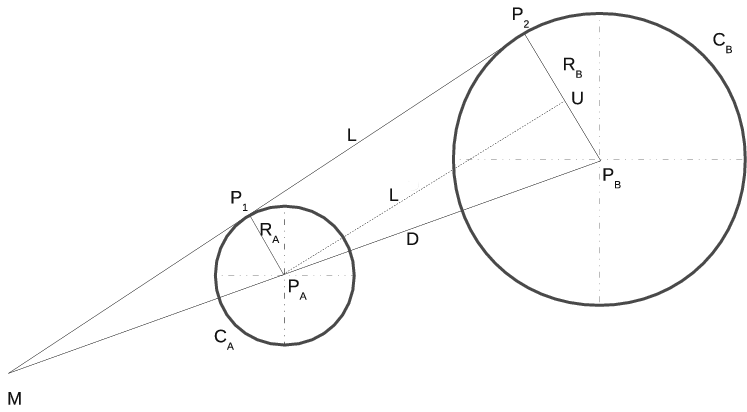
Le triangle \( \widehat {P_A U P_B} \) est rectangle et \( \left | P_AU \right |^2 + \left | P_BU \right |^2 = \left | P_AP_B \right |^2\). En s’appuyant sur ce triangle, nous pouvons déduire que :
$$ \left | P_1P_2 \right | = \sqrt { \left | P_AP_B \right |^2 - (R_A - R_B)^2 }$$
De l’équation précédente, nous pouvons déduire que la première configuration n’existe que si \( \left | P_AP_B \right |^2 \ge (R_A - R_B)^2 \) ie. c’est à dire si aucun des cercles n’est intégralement inclus dans l’autre.
Deuxième configuration
Dans cette nouvelle configuration, les points \(A'\) and \(P_1'\)sont ajoutés de façon à ce que \( \left | P_AP_B \right | = \left | MA' \right | \) et \( \left | P_1P_2 \right | = \left | MP_1' \right | \). Notez que, d’après Thales \( \left | P_1'A' \right | = R_A + R_B \).

Comme pour la première configuration \( \widehat {M P_1' A'} \) est un triangle rectangle. $$ \left | MP_1' \right |^2 + \left | P_1'A' \right |^2 = \left | MA' \right |^2 $$ $$ \left | P_1P_2 \right |^2 + (R_A + R_B)^2 = \left | P_AP_B \right |^2 $$
Il devient facile de déduire : $$ \left | P_1P_2 \right | = \sqrt { \left | P_AP_B \right |^2 - (R_A + R_B)^2 }$$ De l’équation précédente, nous pouvons déduire que la seconde configuration n’existe que si \( \left | P_AP_B \right |^2 \ge (R_A + R_B)^2 \) ie. c’est à dire aucun des cercles n’est intégralement inclus dans l’autre.
Simplification des équations
Une fois que \( \left | P_1P_2 \right |\) est connu, les équations peuvent être reformulées. Considérons \(L\) égale à \( \left | P_1P_2 \right |\), les équations deviennent :
$$ \left \{ \begin{array}{ll} (x_1 - x_A)^2 + (y_1 - y_A)^2 = {R_A}^2 \\ L^2 + {R_B}^2 = (x_1 - x_B)^2 + (y_1 - y_B)^2 \end{array} \right . $$
$$ \left \{ \begin{array}{ll} (x_2 - x_B)^2 + (y_2 - y_B)^2 = {R_B}^2 \\ L^2 + {R_A}^2 = (x_2 - x_A)^2 + (y_2 - y_A)^2 \end{array} \right . $$
Nous disposons maintenant de deux systèmes indépendants non linéaires à résoudre, étant donné la symétrie du problème, la résolution d’un système nous permet d’obtenir la solution générale.
Résolution des équations
Comme les systèmes sont équivalents, nous allons nous intéresser au premier : $$ \left \{ \begin{array}{ll} (x_1 - x_A)^2 + (y_1 - y_A)^2 = {R_A}^2 \\ (x_1 - x_B)^2 + (y_1 - y_B)^2 = L^2 + {R_B}^2 \end{array} \right .$$
Il est évident que la solution géométrique est l’intersection de deux cercles de centres \(P_A\) et \(P_B\) avec des rayons respectifs de \(R_A\) et \(\sqrt{L^2+{R_B}^2}\).
Les coordonnées de \(P_1\) sont données par :
$$ \left \{ \begin{array}{ll} x_1= \frac{x_A+x_B}{2} + \frac{(x_B-x_A)({R_A}^2-{R_1}^2)}{2D^2} \pm 2\frac{y_A-y_B}{D^2}\sigma_1 \\ y_1= \frac{y_A+y_B}{2} + \frac{(y_B-y_A)({R_A}^2-{R_1}^2)}{2D^2} \pm 2\frac{x_A-x_B}{D^2}\sigma_1 \end{array} \right .$$
avec
$$ \begin{array}{ll} D = \sqrt{ (x_B-x_A)^2 + (y_B-y_A)^2 } \\ L = \sqrt { D^2 - (R_A \pm R_B)^2 } \\ R_1= \sqrt{L^2+{R_B}^2} \\ \sigma_1=\frac{1}{4}\sqrt{ (D+R_A+R_1)(D+R_A-R_1)(D-R_A+R_1)(-D+R_A+R_1) } \end{array} .$$
Nous pouvons, de la même façon déterminer les coordonnées de \(P_2\):
$$ \left \{ \begin{array}{ll} x_2= \frac{x_B+x_A}{2} + \frac{(x_A-x_B)({R_B}^2-{R_2}^2)}{2D^2} \pm 2\frac{y_B-y_A}{D^2}\sigma_2 \\ y_2= \frac{y_B+y_A}{2} + \frac{(y_A-y_B)({R_B}^2-{R_2}^2)}{2D^2} \pm 2\frac{x_B-x_A}{D^2}\sigma_2 \end{array} \right .$$
avec
$$ \begin{array}{ll} D = \sqrt{ (x_B-x_A)^2 + (y_B-y_A)^2 } \\ L = \sqrt { D^2 - (R_B \pm R_A)^2 } \\ R_2= \sqrt{L^2+{R_A}^2} \\ \sigma_2=\frac{1}{4}\sqrt{ (D+R_B+R_2)(D+R_B-R_2)(D-R_B+R_2)(-D+R_B+R_2) } \end{array} .$$
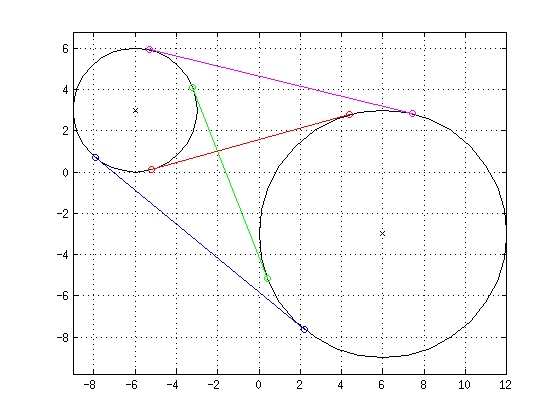
Un test rapide sous Matlab confirme les résultats :
Téléchargements
Un test rapide sous Matlab confirme les résultats :
Voir aussi
- Calculer la transformation entre deux nuages de points
- Splines avec la méthode de Catmull-Rom
- Tester si un nombre est premier en ligne
- Vérifier qu’un point appartient à un segment
- Produit vectoriel (cross product)
- Principales règles de dérivation
- Principales dérivées
- Produit scalaire (dot product)
- Comment calculer les points d'intersection de deux cercles ?
- Comment tester si quatre points sont coplanaires ?
- Principales primitives (calculs intégrals)
- Moindres carrés : approximation avec un polynôme du second degré
- Approximation d'un cercle avec la méthode des moindres carrés
- Approximation d'une sphère avec la méthode des moindres carrés
- Les maths derrière l'ACP
- Résoudre un polynôme du second degré
- Simplificateur de racines carrées en ligne
- Valeurs remarquables des cosinus, sinus et tangeantes
- Décomposition en valeurs singulières (SVD) d’une matrice 2×2
- Comprendre les matrices de covariance
- ACP pondérée