Relation entre vitesse linéaire et angulaire, produit vectoriel
Cette page présente l'utilisation du produit vectoriel pour la conversion de vitesses linéaires en vitesses angulaires (ou l'inverse).
De la vitesse linéaire vers la vitesse angulaire
Considérons le corps C, en rotation autour du point O. La vitesse linéaire du point A est donnée par \( \vec{V} \).

La vitesse angulaire autour du point O est donnée par:
$$ \vec{\omega} = \frac {\vec{OA} \times \vec{V}} { \| \vec{OA} \| ^2 } $$
De la vitesse angulaire vers la vitesse linéaire
En supposant maintenant que la vitesse angulaire est connue, la vitesse linéaire au point A est donnée par:
$$ \vec{V} = \vec{\omega} \times \vec{OA} $$
Exemple
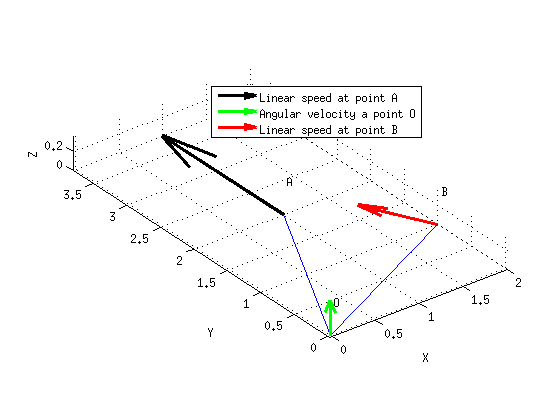
Le code Matlab suivant montre comment convertir la vitesse angulaire en vitesse linéaire et vice versa:
close all;
clear all;
clc;
%% Parameters
% Coordinates of point O
O=[0;0;0];
% Coordinates of point A
A=[1;2;0];
% Coordinates of point B
B=[2;1;0];
% Speed applied at point A
VA=[0;2;0];
%% Compute angular velocity
% Compute vector OA
vOA=A-O;
% Compute angular speed around point A
wO=cross (vOA,VA)/(norm(vOA)*norm(vOA));
%% Compute linear speed at point B
vOB=B-O;
VB=cross(wO,vOB);
%% Draw system
plot3(O(1),O(2),O(3));
hold on;
line ([O(1) A(1)],[O(2) A(2)],[O(3) A(3)]);
line ([O(1) B(1)],[O(2) B(2)],[O(3) B(3)]);
text(O(1)+0.2,O(2)+0.2,O(3)+0.2,'O','FontSize',100);
text(A(1)+0.2,A(2)+0.2,A(3)+0.2,'A','FontSize',100);
text(B(1)+0.2,B(2)+0.2,B(3)+0.2,'B','FontSize',100);
% Draw speed at point A
hFA=quiver3 (A(1),A(2),A(3),VA(1),VA(2),VA(3),'Color','k','LineWidth',3,'MaxHeadSize',1.5);
% Draw speed at point O
hTO=quiver3 (O(1),O(2),O(3),wO(1),wO(2),wO(3),'Color','g','LineWidth',3,'MaxHeadSize',1.5);
% Draw speed at point B
hFB=quiver3 (B(1),B(2),B(3),VB(1),VB(2),VB(3),'Color','r','LineWidth',3,'MaxHeadSize',1.5);
% Display axis and legends
grid on;
axis square equal;
xlabel('X');
ylabel('Y');
zlabel('Z');
legend ([hFA,hTO,hFB],'Linear speed at point A','Angular velocity a point O','Linear speed at point B');Voir aussi
- Engrenage paramètrable pour Solidworks
- Collision élastique - Partie 1 - Hypothèses
- Collision élastique - Partie 2 - Décomposition de la vitesse
- Collision élastique - Partie 3 - Calcul de la vitesse
- Collision élastique - Partie 4 - Synthèse et mémo
- Collision élastique - Partie 5 - Code source
- Collision élastique - Équations et simulation
- Activer des compléments (add-ins) dans Solidworks
- Principe fondamental de la dynamique
- Modèle géométrique d'un robot mobile à roues différentielles
- Comment insérer des engrenages dans un assemblage Solidworks
- Modèle mathématique d'un différentiel mécanique
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 2]
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 3]
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 4]
- Modèle d'une articulation actionnée par un moteur linéaire
Dernière mise à jour : 04/02/2020