Modèle mathématique d'un différentiel mécanique
Cette page expose et détail le modèle mathématique d'un différentiel mécanique (type voiture) :
Espace de travail
Pour commencer, définissons notre espace de travail (axes et sens de rotations) :
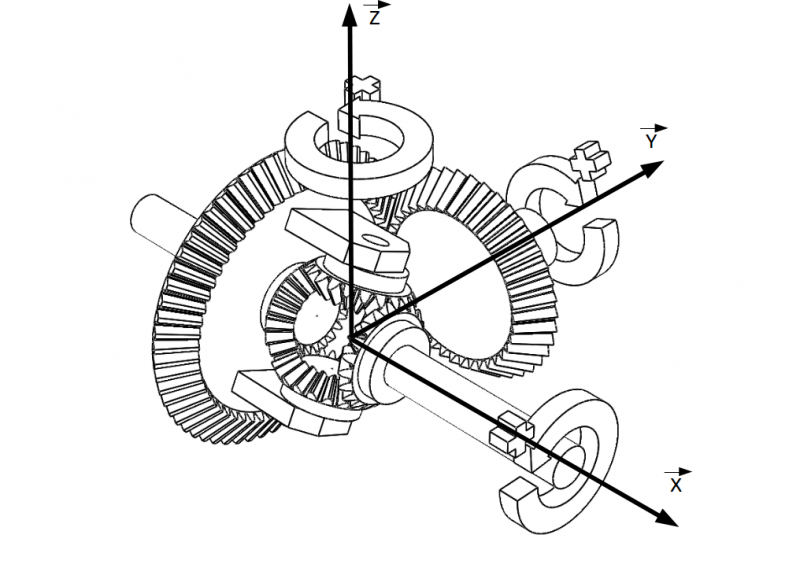
Nommons chaque roue dentée. La roue \(i\) est libellée \(Z_i\) et est composée de \(Z_i\) dents :

Renvoi d'angle
Isolons le renvoi d'angle :
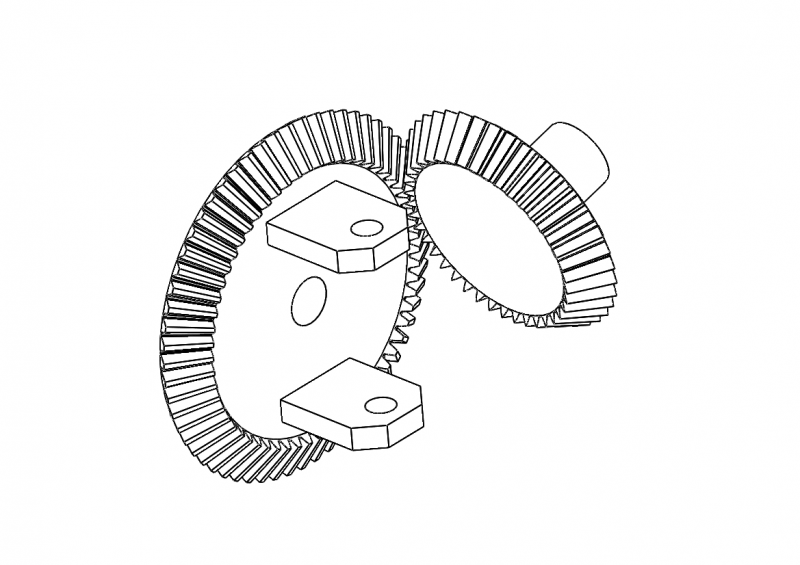
Il s'agit d'une transmission classique, la relation est donnée par :
$$ \omega_1.Z_1 = \omega_2.Z_2 $$
et
$$ \frac {\Gamma_1}{\Gamma_2} = \frac {Z_1} {Z_2} $$
Dans la suite, nous ne considérerons plus cette transmission.
Dans la cage
Nous allons maintenant travailler dans un référentiel attaché à la cage (\(Z_2\)) et analyser les roues dentées \(Z_3\), \(Z_4\), \(Z_5\) et \(Z_6\). Le terme \(\omega^c_i\) est la vitesse angulaire de la roue \(Z_i\) exprimée dans le référentiel attaché à la cage.
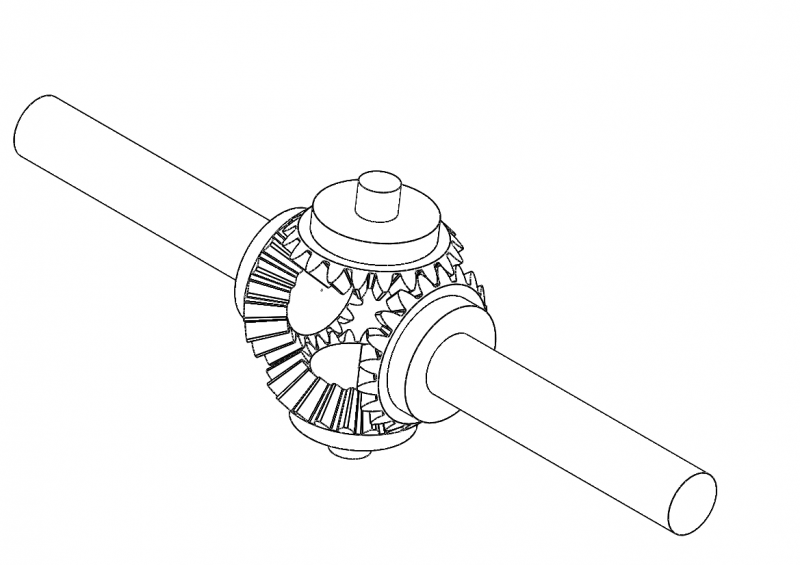
D'après la convention précédente relative aux sens de rotation, les transmissions entre les roues \(Z_3\), \(Z_4\), \(Z_5\) and \(Z_6\) sont données par :
$$ \begin{matrix} \omega^c_4.Z_4=\omega_3^c.Z_3 \\ \omega^c_3.Z_3=\omega^c_5.Z_5 \end{matrix} $$
Notons que la roue \(Z_6\) est redondante par rapport à \(Z_3\). La relation entre les roues \(Z_4\) et \(Z_5\) est donnée par :
$$ \omega^c_4.Z_4=-\omega^c_5.Z_5 $$ $$ \frac{\omega^c_4}{\omega^c_5}=-\frac{Z_5}{Z_4}=-1 $$
Comme \(Z_4=Z_5\), la relation entre les vitesses angulaires est :
$$ \omega^c_4=-\omega^c_5 $$
Référentiel global
Revenons dans le référentiel global. La vitesse de rotation de la cage est donnée par \(\omega_2\). Dans le référentiel de la cage, la vitesse angulaire de la roue \( Z_4\) est égale à \(\omega_4\). La vitesse angulaire de la roue \(Z_4\)d ans le référentiel global est alors donné par :
$$ \omega_4=\omega_2+\omega^c_4 $$
En raisonnant de façon similaire, nous pouvons aussi exprimer la vitesse angulaire de la roue \(Z_5\) dans le référentiel global :
$$ \omega_5=\omega_2+\omega^c_5 $$
Rassemblons les équation précédente au sein d'un même système :
$$ \left\lbrace \begin{array}{r c l} \omega_4 &=& \omega_2+\omega^c_4 \\ \omega_5 &=& \omega_2+\omega^c_5 \\ \omega^c_4 &=& -\omega^c_5 \end{array} \right. $$
$$ \left\lbrace \begin{array}{r c l} \omega_4 &=& \omega_2-\omega^c_5 \\ \omega_5 &=& \omega_2+\omega^c_5 \end{array} \right. $$
$$ \left\lbrace \begin{array}{r c l} \omega^c_5 &=& \omega_2-\omega_4 \\ \omega_5 &=& \omega_2+\omega^c_5 \end{array} \right. $$
La résolution du système nous donne l'équation du modèle :
$$ \omega_2 = \frac{1}{2}(\omega_4+\omega_5) $$
Couple
La relation de couple entre les roues dentées \(Z_3\), \(Z_4\) and \(Z_5\) est donnée par :
$$ \begin{matrix} \frac{\Gamma_4}{\Gamma_3}=\frac{Z_4}{Z_3} \\ \frac{\Gamma_5}{\Gamma_3}=\frac{Z_5}{Z_3} \end{matrix} $$
Comme \(Z_5=Z_4\) :
$$ \frac{\Gamma_4}{\Gamma_3}=\frac{\Gamma_5}{\Gamma_3} $$
Nous obtenons finalement :
$$ \Gamma_4=\Gamma_5 $$
Puissance
La puissance d'entrée doit être égale à la puissance de sortie:
$$ P_{in}=P_{out} $$
Comme \(P=\Gamma.\omega\), , le couple de sortie peut être réécrit sous la forme suivante :
$$ P_{out}=P_4+P_5=\Gamma_4.\omega_4+\Gamma_5.\omega_5 $$
Comme \(\Gamma_4=\Gamma_5\), l'équation précédente peut être simplifiée :
$$ P_{out}=\Gamma_4.(\omega_4+\omega_5) $$
Comme \(\omega_4+\omega_5=2.\omega_2\), l'équation peut être reformulée :
$$ P_{out}=\Gamma_4.(2.\omega_2)=\Gamma_2\omega_2=P_{in} $$
Nous obtenons finalement :
$$ 2.\Gamma_4=\Gamma_2 $$
Conclusion
La relation entre les vitesses est donnée par:
$$ \omega_2 = \frac{1}{2}(\omega_4+\omega_5) $$
La relation entre les couples est donnée par:
$$ \frac{\Gamma_2}{2} = \Gamma_4=\Gamma_5 $$
Voir aussi
- Relation entre vitesse linéaire et angulaire, produit vectoriel
- Engrenage paramètrable pour Solidworks
- Collision élastique - Partie 1 - Hypothèses
- Collision élastique - Partie 2 - Décomposition de la vitesse
- Collision élastique - Partie 3 - Calcul de la vitesse
- Collision élastique - Partie 4 - Synthèse et mémo
- Collision élastique - Partie 5 - Code source
- Collision élastique - Équations et simulation
- Activer des compléments (add-ins) dans Solidworks
- Principe fondamental de la dynamique
- Modèle géométrique d'un robot mobile à roues différentielles
- Comment insérer des engrenages dans un assemblage Solidworks
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 2]
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 3]
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 4]
- Modèle d'une articulation actionnée par un moteur linéaire