Modèle géométrique d'un robot mobile à roues différentielles
Le modèle géomètrique que nous étudions ici est une transformation mathèmatique dont les entrées sont les vitesses angulaires des roues (généralement mesurées avec des codeurs) et la sortie est la pose (position et orientation) du robot mobile dans son espace de travail.
Définition du problème
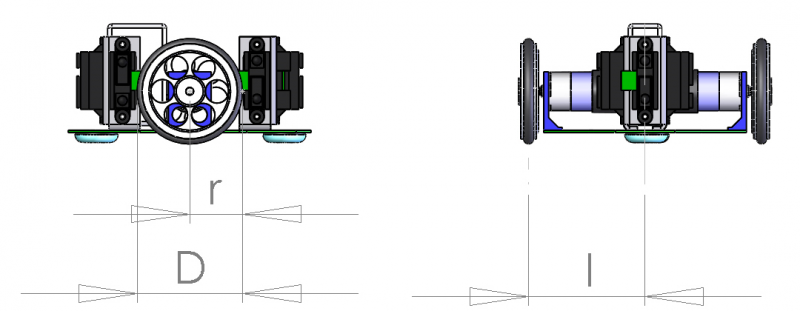
Nous nous intéresserons ici aux robots à roues différentielles. Ce type de robot est constitué de deux roues alignées sur le même axe. Ci-dessous, se trouve une illustration de Rat-Courci, un petit robot à roues différentielles conçu pour le concours Micromouse :

Le diamètre des roues est donné par \(D=2.r\) où \(r\) est le rayon. La distance entre le centre du robot et les roues est donné par \(l\), la distance entre les roues est alors donnée par \(2 \times l \) conformément à l’illustration suivante :
Nous supposerons les paramètres suivants connus :
- \(r\) est le rayon des roues;
- \(l\) la distance entre le centre du robot et les roues;
- \(\omega_l\) et \(\omega_r\) sont respectivement les vitesses angulaires
- instantanées des roues gauche et droite.

Notre but est de calculer la pose du robot définie selon la figure ci-dessus :
- \(x\) et \(y\) sont les coordonnées cartésiennes du robot ;
- \(\psi\) est l’orientation (position angulaire) du robot.
Calcul des déplacements élémentaires
Pour commencer, calculons la vitesse linéaire de chaque roue :
$$ \begin{array}{r c l} v_l &=& r.\omega_l \\ v_r &=& r.\omega_r \end{array} $$
La vitesse moyenne du robot est alors donnée par :
$$ v_{robot}=\frac {v_l + v_r} {2} $$
TLa vitesse du robot peut être projetée le long des axes \(x\) et \(y\) :
$$ \begin{array}{r c l} \Delta_x &=& v_{robot}.cos(\psi) &=& \frac {r}{2} [ \omega_l.cos(\psi) &+& \omega_r.cos(\psi) ] \\ \Delta_y &=& v_{robot}.sin(\psi) &=& \frac {r}{2} [ \omega_l.sin(\psi) &+& \omega_r.sin(\psi) ] \end{array} $$
La vitesse angulaire du robot est calculée par la différence des vitesses linéaires des roues :
$$ 2.l.\Delta_{\Psi}=r.\omega_r - r.\omega_l$$
L’équation précédente peut être reformulée :
$$ \Delta_{\Psi}=\frac {r.\omega_r - r.\omega_l} {2.l} $$
Le déplacement élémentaire du robot est donnée par la relation suivante :
$$ \left[ \begin{matrix} \Delta_x \\ \Delta_y \\ \Delta_{\Psi} \end{matrix} \right]= \frac{r}{2} \times \left[ \begin{matrix} cos(\psi) & cos(\psi) \\ sin(\psi) & sin(\psi) \\ \frac{1}{l} & \frac{-1}{l} \end{matrix} \right] \times \left[ \begin{matrix} \omega_r \\ \omega_l\end{matrix} \right] $$
Position absolue
La position absolue peut être calculée grâce aux équations suivantes :
$$ \begin{array}{r c l} x_{i}&=&x_{i-1}+\Delta_x \\ y_{i}&=&y_{i-1}+\Delta_y \\ \Psi_{i}&=&\Psi_{i-1}+\Delta_{\Psi} \end{array} $$
où
- \(x_{i}\) et \(y_{i}\) sont les coordonnées cartésiennes du robot à l’instant \(i\);
- \(\Psi_{i}\) est l’orientation du robot à l’instant \(i\).
Bien sûr, ce modèle a quelques limitations. Le résultat est fortement dépendant de la précision de la mécanique du robot (ajustements, diamètre des roues, mesures...). Nous supposons ici qu’il n’y a pas de glissement, ce qui n’est pas vrai en pratique. Nous supposons également que la fréquence d’échantillonnage est suffisamment rapide pour garantir que \(\Delta_x\), \(\Delta_y\) et \(\Delta_\Psi\) pourront être considérés comme des déplacements élémentaires.
Voir aussi
- Relation entre vitesse linéaire et angulaire, produit vectoriel
- Engrenage paramètrable pour Solidworks
- Collision élastique - Partie 1 - Hypothèses
- Collision élastique - Partie 2 - Décomposition de la vitesse
- Collision élastique - Partie 3 - Calcul de la vitesse
- Collision élastique - Partie 4 - Synthèse et mémo
- Collision élastique - Partie 5 - Code source
- Collision élastique - Équations et simulation
- Activer des compléments (add-ins) dans Solidworks
- Principe fondamental de la dynamique
- Comment insérer des engrenages dans un assemblage Solidworks
- Modèle mathématique d'un différentiel mécanique
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 2]
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 3]
- Modèle d'une articulation actionnée par un moteur linéaire [Partie 4]
- Modèle d'une articulation actionnée par un moteur linéaire